IL LABORATORIO DI AUTOMATICA:
L.I.R.A. (Laboratory on Intelligent Robotics and Automation)
(Personale Tecnico: Mauro Mazza, mauro.mazza@unife.it Tel. 0532 974931)
DIMOSTRAZIONE ATTIVITA':
Video sul canale YouTube del Laboratorio
DOTAZIONE:
- Robot industriale collaborativo a 7 gradi di libertà Franka Emika Panda (Research version).
|
 |
|
|
 |
- Haptic device per la teleoperazione robotica a 5 gradi di libertà (assemblato con due unità Novint Falcon)
|
 |
- Robot mobile a guida differenziale, interamente costruito presso il laboratorio e con elettronica custom
|

|
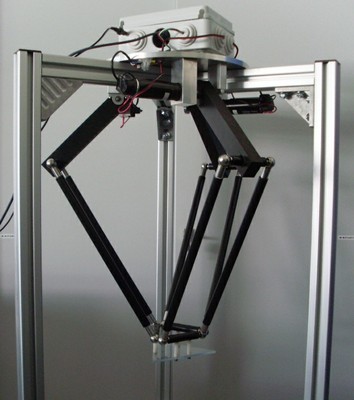
- Robot parallelo di tipo Delta a tre gradi di libertà, interamente costruito presso il laboratorio e con elettronica custom
|
 |
- Sistemi di controllo per automazione industriale PLC e Motion Control:
- PLC Siemens S7-300
- Sistema di Motion Control Elau Max-4
- PLC Allen-Bradley CompactLogix
- Sistema di Motion Control Allen-Bradley Kinetix2000
|

|
- Telecamere RGB-D Intel Realsense D415/D435
- Dispositivi di hand tracking Leap Motion
- Oscilloscopi Tektronix a due e a quattro canali portatili
- Banchi attrezzati per l’assemblaggio di schede elettroniche a circuito stampato
- Strumenti di sviluppo e programmatori per microcontrollori Microchip (PIC/dsPIC) e Texas Instruments (MSP430 e DSP C2000)
|





|

